Deadlock Avoidance
Deadlock-prevention algorithms, as discussed in Section 8.5, prevent dead- locks by limiting how requests can be made. The limits ensure that at least one of the necessary conditions for deadlock cannot occur. Possible side effects of preventing deadlocks by this method, however, are low device utilization and reduced system throughput.
An alternative method for avoiding deadlocks is to require additional information about how resources are to be requested. For example, in a system with resources R 1 and R 2, the system might need to know that thread P will request first R 1 and then R 2 before releasing both resources, whereas thread Q will request R 2 and then R 1. With this knowledge of the complete sequence of requests and releases for each thread, the system can decide for each request whether or not the thread should wait in order to avoid a possible future deadlock. Each request requires that in making this decision the system consider the resources currently available, the resources currently allocated to each thread, and the future requests and releases of each thread.
The various algorithms that use this approach differ in the amount and type of information required. The simplest andmost usefulmodel requires that each thread declare the**maximum number** of resources of each type that it may need. Given this a priori information, it is possible to construct an algorithm that ensures that the system will never enter a deadlocked state. A deadlock- avoidance algorithm dynamically examines the resource-allocation state to ensure that a circular-wait condition can never exist. The resource-allocation state is defined by the number of available and allocated resources and the maximum demands of the threads. In the following sections, we explore two deadlock-avoidance algorithms.
LINUX LOCKDEP TOOL
Although ensuring that resources are acquired in the proper order is the responsibility of kernel and application developers, certain software can be used to verify that locks are acquired in the proper order. To detect possible deadlocks, Linux provides lockdep, a tool with rich functionality that can be used to verify locking order in the kernel. lockdep is designed to be enabled on a running kernel as it monitors usage patterns of lock acquisitions and releases against a set of rules for acquiring and releasing locks. Two examples follow, but note that lockdep provides significantly more functionality than what is described here:
• The order in which locks are acquired is dynamically maintained by the system. If lockdep detects locks being acquired out of order, it reports a possible deadlock condition.
• In Linux, spinlocks can be used in interrupt handlers. A possible source of deadlock occurs when the kernel acquires a spinlock that is also used in an interrupt handler. If the interrupt occurs while the lock is being held, the interrupt handler preempts the kernel code currently holding the lock and then spins while attempting to acquire the lock, resulting in deadlock. The general strategy for avoiding this situation is to disable interrupts on the current processor before acquiring a spinlock that is also used in an interrupt handler. If lockdep detects that interrupts are enabledwhile kernel code acquires a lock that is also used in an interrupt handler, it will report a possible deadlock scenario.
lockdep was developed to be used as a tool in developing or modifying code in the kernel and not to be used on production systems, as it can significantly slow down a system. Its purpose is to test whether software such as a new device driver or kernel module provides a possible source of deadlock. The designers of lockdep have reported that within a few years of its development in 2006, the number of deadlocks from system reports had been reduced by an order of magnitude.⣞ Although lockdep was originally designed only for use in the kernel, recent revisions of this tool can now be used for detecting deadlocks in user applications using Pthreads mutex locks. Further details on the lockdep tool can be found at https://www.kernel.org/doc/Documentation/locking/lockdep-design.txt.
Safe State
A state is safe if the system can allocate resources to each thread (up to its maximum) in some order and still avoid a deadlock. More formally, a system is in a safe state only if there exists a safe sequence. A sequence of threads <T 1, T 2, …, Tn> is a safe sequence for the current allocation state if, for each Ti, the resource requests that Ti can still make can be satisfied by the currently available resources plus the resources held by all Tj, with j < i. In this situation, if the resources that Ti needs are not immediately available, then Ti can wait until all Tj have finished. When they have finished, Ti can obtain all of its
needed resources, complete its designated task, return its allocated resources, and terminate. When Ti terminates, Ti+1 can obtain its needed resources, and so on. If no such sequence exists, then the system state is said to be unsafe.
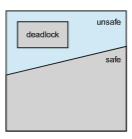
A safe state is not a deadlocked state. Conversely, a deadlocked state is an unsafe state. Not all unsafe states are deadlocks, however (Figure 8.8). An unsafe state may lead to a deadlock. As long as the state is safe, the operating system can avoid unsafe (and deadlocked) states. In an unsafe state, the operating system cannot prevent threads from requesting resources in such away that a deadlock occurs. The behavior of the threads controls unsafe states.
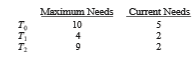
To illustrate, consider a system with twelve resources and three threads: T 0, T 1, and T 2. Thread T 0 requires ten resources, thread T 1 may need as many as four, and thread T 2 may need up to nine resources. Suppose that, at time t 0, thread T 0 is holding five resources, thread T 1 is holding two resources, and thread T 2 is holding two resources. (Thus, there are three free resources.)
Asystem can go from a safe state to an unsafe state. Suppose that, at time t 1, thread T 2 requests and is allocated one more resource. The system is no longer in a safe state. At this point, only thread T 1 can be allocated all its resources. When it returns them, the system will have only four available resources. Since thread T 0 is allocated five resources but has a maximum of ten, it may request five more resources. If it does so, it will have to wait, because they are unavailable. Similarly, thread T 2 may request six additional resources and have to wait, resulting in a deadlock. Our mistake was in granting the request from thread_T_ 2 for onemore resource. If we hadmade_T_ 2 wait until either of the other
threads had finished and released its resources, then we could have avoided the deadlock.
Given the concept of a safe state, we can define avoidance algorithms that ensure that the systemwill never deadlock. The idea is simply to ensure that the system will always remain in a safe state. Initially, the system is in a safe state. Whenever a thread requests a resource that is currently available, the system must decide whether the resource can be allocated immediately or the thread must wait. The request is granted only if the allocation leaves the system in a safe state.
In this scheme, if a thread requests a resource that is currently available, it may still have to wait. Thus, resource utilization may be lower than it would otherwise be.
Resource-Allocation-Graph Algorithm
If we have a resource-allocation systemwith only one instance of each resource type, we can use a variant of the resource-allocation graph defined in Section 8.3.2 for deadlock avoidance. In addition to the request and assignment edges already described, we introduce a new type of edge, called a claim edge. A claim edge_Ti_→_Rj_ indicates that thread_Ti_may request resource_Rj_ at some time in the future. This edge resembles a request edge in direction but is represented in the graph by a dashed line. When thread Ti requests resource Rj, the claim edge Ti → Rj is converted to a request edge. Similarly, when a resource Rj is released by Ti, the assignment edge Rj → Ti is reconverted to a claim edge Ti → Rj.
Note that the resources must be claimed a priori in the system. That is, before thread Ti starts executing, all its claim edges must already appear in the resource-allocation graph.We can relax this condition by allowing a claim edge Ti → Rj to be added to the graph only if all the edges associated with thread Ti are claim edges.
Now suppose that thread Ti requests resource Rj. The request can be granted only if converting the request edge Ti → Rj to an assignment edge Rj → Ti does not result in the formation of a cycle in the resource-allocation graph. We check for safety by using a cycle-detection algorithm. An algorithm for detecting a cycle in this graph requires an order of n 2 operations, where n is the number of threads in the system.
If no cycle exists, then the allocation of the resource will leave the system in a safe state. If a cycle is found, then the allocation will put the system in an unsafe state. In that case, thread Ti will have to wait for its requests to be satisfied.
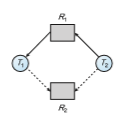
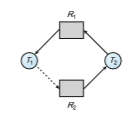
To illustrate this algorithm, we consider the resource-allocation graph of Figure 8.9. Suppose that T 2 requests R 2. Although R 2 is currently free, we cannot allocate it to T 2, since this action will create a cycle in the graph (Figure 8.10). A cycle, as mentioned, indicates that the system is in an unsafe state. If T 1 requests R 2, and T 2 requests R 1, then a deadlock will occur.
Banker’s Algorithm
The resource-allocation-graph algorithm is not applicable to a resource- allocation system with multiple instances of each resource type. The
deadlock-avoidance algorithm that we describe next is applicable to such a system but is less efficient than the resource-allocation graph scheme. This algorithm is commonly known as the banker’s algorithm. The name was chosen because the algorithm could be used in a banking system to ensure that the bank never allocated its available cash in such a way that it could no longer satisfy the needs of all its customers.
When a new thread enters the system, it must declare the maximum num- ber of instances of each resource type that it may need. This number may not exceed the total number of resources in the system. When a user requests a set of resources, the system must determine whether the allocation of these resources will leave the system in a safe state. If it will, the resources are allo- cated; otherwise, the threadmust wait until some other thread releases enough resources.
Several data structures must be maintained to implement the banker’s algorithm. These data structures encode the state of the resource-allocation system. We need the following data structures, where n is the number of threads in the system and m is the number of resource types:
• Available. Avector of length_m_ indicates the number of available resources of each type. If Available[j] equals k, then k instances of resource type Rj are available.
• Max. An n × m matrix defines the maximum demand of each thread. If Max[i][j] equals k, then thread Ti may request at most k instances of resource type Rj.
• Allocation. An n × _m_matrix defines the number of resources of each type currently allocated to each thread. If Allocation[i][j] equals k, then thread Ti is currently allocated k instances of resource type Rj.
• Need. An n × m matrix indicates the remaining resource need of each thread. If Need[i][j] equals k, then thread Ti may need k more instances of resource type Rj to complete its task. Note that Need[i][j] equals Max[i][j] − Allocation[i][j].
These data structures vary over time in both size and value. To simplify the presentation of the banker’s algorithm, we next establish
some notation. Let_X_ and_Y_ be vectors of length n.We say that_X ≤_Y if and only if X[i] ≤ Y[i] for all i = 1, 2, …, n. For example, if X = (1,7,3,2) and Y = (0,3,2,1), then Y ≤ X. In addition, Y < X if Y ≤ X and Y ≠ X.
We can treat each row in the matrices Allocation and Need as vectors and refer to them as Allocationi and Needi**.** The vector Allocationi specifies the resources currently allocated to thread Ti; the vector Needi specifies the additional resources that thread Ti may still request to complete its task.
Safety Algorithm
We can now present the algorithm for finding out whether or not a system is in a safe state. This algorithm can be described as follows:
1. Let**Work** and Finish be vectors of length m and n, respectively. Initialize Work = Available and Finish[i] = false for i = 0, 1, …, n − 1.
2. Find an index i such that both
a. Finish[i] == false
b. Needi ≤**Work**
If no such i exists, go to step 4.
3. Work =Work + Allocationi Finish[i] = true Go to step 2.
4. If Finish[i] == true for all i, then the system is in a safe state.
This algorithmmay require an order of_m_ × _n_2 operations to determinewhether a state is safe.
Resource-Request Algorithm
Next, we describe the algorithm for determining whether requests can be safely granted. Let Requesti be the request vector for thread Ti. If Requesti [j] == k, then thread Ti wants k instances of resource type Rj. When a request for resources is made by thread Ti, the following actions are taken:
1. If**Requesti ≤Need**i, go to step 2. Otherwise, raise an error condition, since the thread has exceeded its maximum claim.
2. If Requesti ≤ Available, go to step 3. Otherwise, Ti must wait, since the resources are not available.
3. Have the system pretend to have allocated the requested resources to thread Ti by modifying the state as follows:
Available = Available–Requesti Allocationi = Allocationi + Requesti Needi = Needi–Requesti
If the resulting resource-allocation state is safe, the transaction is com- pleted, and thread Ti is allocated its resources. However, if the new state is unsafe, then Ti must wait for Requesti**,** and the old resource-allocation state is restored.
An Illustrative Example
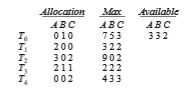
To illustrate the use of the banker’s algorithm, consider a system with five threads T 0 through T 4 and three resource types A, B, and C. Resource type A has ten instances, resource type B has five instances, and resource type C has seven instances. Suppose that the following snapshot represents the current state of the system:

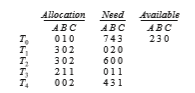
satisfies the safety requirement. Hence, we can immediately grant the request of thread T 1.
You should be able to see, however, that when the system is in this state, a request for (3,3,0) by T 4 cannot be granted, since the resources are not available. Furthermore, a request for (0,2,0) by T 0 cannot be granted, even though the resources are available, since the resulting state is unsafe.
We leave it as a programming exercise for students to implement the banker’s algorithm.